Welcome to CW Green Tech Limited
[email protected]
86-136 6712 1125


AM8511-0200-0030
High Inertia Design: Unlike the aforementioned models, the AM8511 series is a high-inertia motor with a larger rotor inertia, which can better match high-inertia loads and smoothly transmit torque.
Rated Power: Usually, there are multiple specifications available to meet the requirements of different applications.
Application Scenarios: It is often used in situations where large inertial loads need to be overcome, such as large rotating equipment and winding equipment, effectively reducing system vibration and shock, and improving the operational stability and processing accuracy of the equipment.
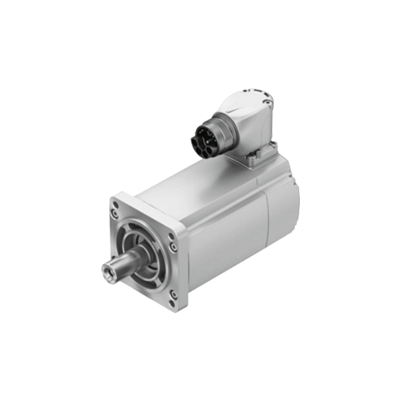
The AM8511-0200-0030 is a rotary synchronous servomotor in the AM8000 series from Beckhoff, featuring a high inertia, and is described in detail below:
1. Dimensions and mounting
- Motor length (without shaft extension): approx. 160 mm.
- Shaft diameter: 14mm.
- Shaft extension length: 30mm.
- The mounting method adopts a 60mm square flange that conforms to IEC standards, making it easy to mount on various types of machinery and equipment.
2. Protection and weight
- Protection class IP65 means that the motor can effectively prevent dust intrusion and can withstand water jets from all directions without damage, making it suitable for use in harsher industrial environments.
- Weight approx. 4.2kg.
Electrical data
1. Power and voltage
- Rated power: 0.75kW, providing stable power output for the equipment.
- Rated voltage: 400V (three-phase AC), a common voltage specification for industrial applications. 2.
2. Current and speed**
- Rated current: 2.2A.
- Rated speed: 3000rpm, which can meet the speed requirements in a variety of application scenarios.
3. Torque Rated torque: 2.4 Nm.
- Rated torque: 2.4 Nm.
- Peak torque: 7.2 Nm. It can provide large torque in a short period of time to cope with the sudden change of load.
- Stall torque: 4.8 Nm.
4. Moment of inertia: The moment of inertia is 13.0×10-⁴ kg-m², the higher moment of inertia enables the motor to better match the high inertia loads and run more smoothly. 5. **Cooling method***: The motor can be cooled by the cooling system.
5. Cooling method: Adopting self-cooling (IC 40) method, heat dissipation is realized through the motor's own cooling structure and the natural convection of the surrounding air.
Encoder data
1. Encoder type: Equipped with a single-turn absolute encoder with a resolution of 20 bits in general. This kind of encoder can accurately feedback the position information of the motor shaft, providing for high precision position control.
2. **Feedback interface**: Equipped with EnDat 2.2 interface, this interface can realize fast and accurate data transmission, and also supports diagnosis and configuration function, which is convenient for users to debug and maintain the motor.
Temperature and environmental data
1. Insulation class: The winding insulation class is F, and the maximum permissible temperature is 155°C. This ensures that the motor can still operate safely and reliably in a certain high temperature environment.
2. Ambient Temperature Range: The motor can operate normally in ambient temperatures ranging from -20°C to +40°C, but the environment is required to be free of condensation.
3. RELATIVE HUMIDITY: It can adapt to ambient conditions where the relative humidity is up to 95% (non-condensing).
Performance Characteristics
1. Overload capacity: with a maximum overload capacity of 3 times the rated torque, it can withstand large load shocks in a short time and adapt to complex and changing working conditions. 2.
2. Control Accuracy: Speed control accuracy can reach ±0.0%.
- The speed control accuracy can reach ±0.01%, which can realize precise speed adjustment.
- Position control accuracy depends on factors such as encoder resolution and system configuration, and usually meets the needs of most precision positioning applications.